오늘은 테슬라에서 A.I 데이를 열었습니다.
한국시간으로는 2021.08.20(KST) 9 a.m 부터 시작했습니다.
주주로서 미래기술에 관심이 많은 사람으로서 라이브를 하나도 안빼고 보았는데요.
매~~~우 쉽게 몇 부작으로 설명 드리겠습니다.
(잘못된 내용이 있다면 알려주시면 감사하겠습니다!)

이번 A.I 데이는 몇 주전부터 뿌려진 떡밥 사진들 때문에 핫했죠??
떡밥부터 간단히 보겠습니다.
먼저 AI 기술자로서 유명한 데니스 홍이 이런 의문의 칩을 올리면서 8월 초부터 아주 핫했습니다.
왜냐구요? 테슬라 지금 하는게 소프트웨어, 통신, 차량, 우주산업 이렇게나 많은데
(머스크 지분이니 관련있다 정도..)
AI라는 단어가 등장하니 당연히 놀래죠. 일론은 혁신의 아이콘이니까요 ㅎㅎ

이 트윗이 나오자마자부터 오늘까지 엄청난 루머가 생성되었습니다.
테슬라 컴퓨팅의 차세대 칩이다.(비전 FSD)
차량충전용 로봇을 위한 칩이다.(주유원처럼)
홈서비스 로봇을 위한 칩니다.
도조 슈퍼컴퓨팅 연산칩이다. 등등
모두가 물음표를 띠우던 중 저번주에 갑자기 핫한 사진이 돌았습니다.
미국 로봇연구회사인 BostonDynamics 로봇영상이 공개되었고,
점프는 물론 균형잡기와 백플립까지 하는 모습을 보여주었습니다.


그럼 이게 왜 핫한 사진이냐 하면 이 영상이 뜨고서 돌아다닌 사진 중에 하나 때문입니다.

테슬라 써있죠?????? 같은회사에서 테슬라 로고가 발견된겁니다.
아마 테스트용인거 같은데 이 사진이 저 칩을 확실히 연상케 하는데 엄청난 기대감이 붙은거죠!
이렇게 기대감이 극에 달해 있는 중에 A.I 데이 행사는 시작되었고,
오늘은 그 내용을 아~~~~~~~~주 간단히 진짜 요약만 하겠습니다.
라이브보면 영어 듣기만 되도 다 알아듣는데 3시간짜리를 블로그에 옮길 순 없으니깐 말이죠!
1부. 우린 이렇게 실데이터로 기술개발/고도화로 자율주행을 만들었어 봐봐.
결론
우린 8개의 카메라를 통해 완벽한 3차원 공간을 구현했어.
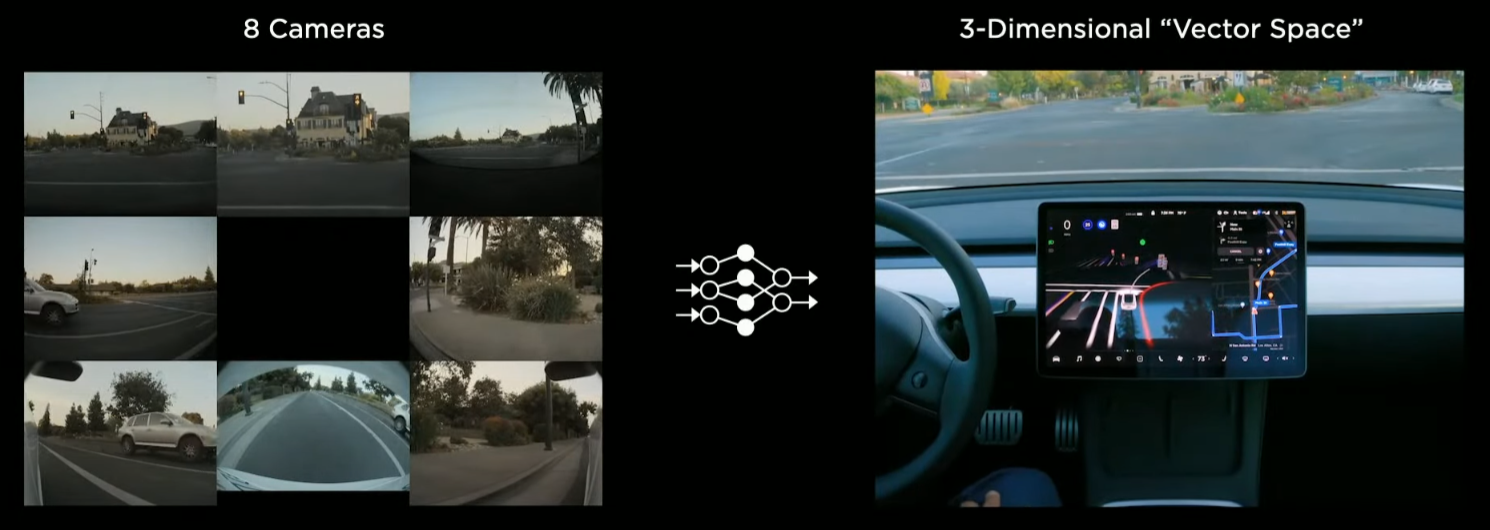
어떻게?
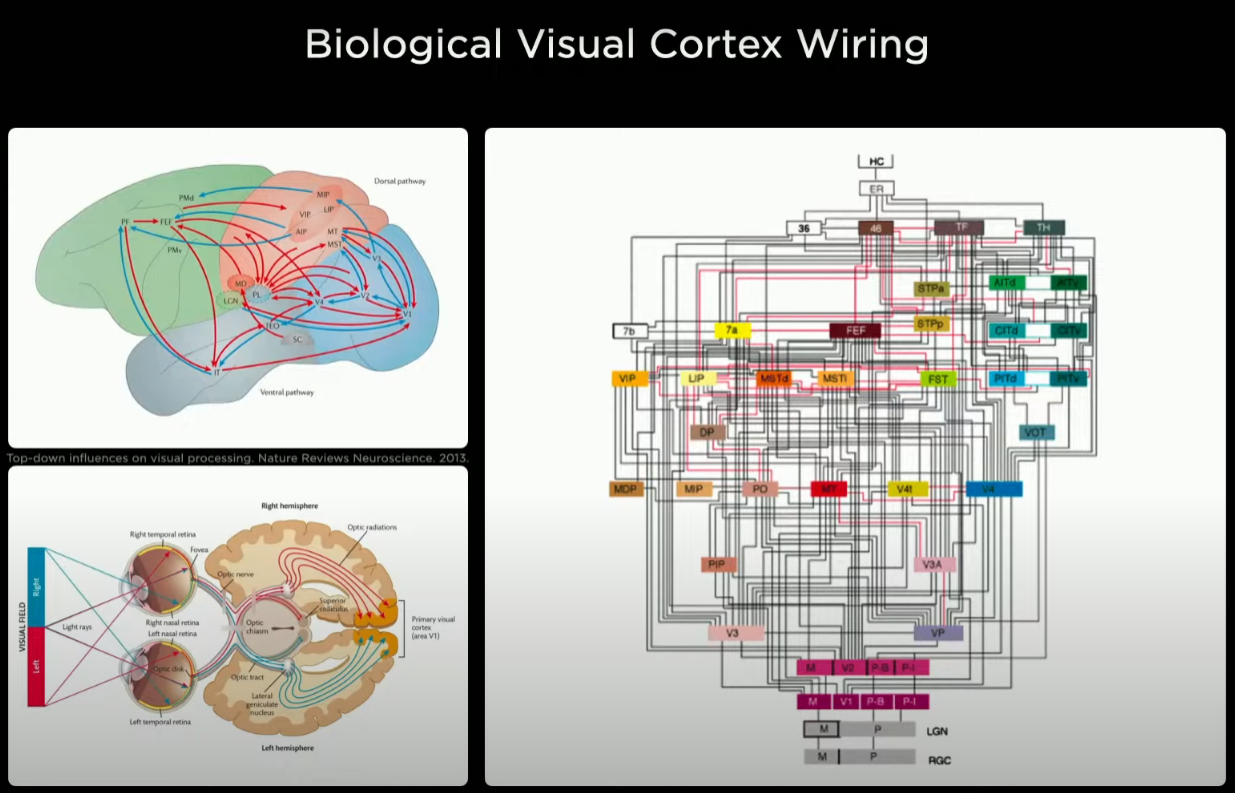
사람의 눈이 뇌와함께 판단하는 로직처럼 최대한 신경망을 구성해봤어.
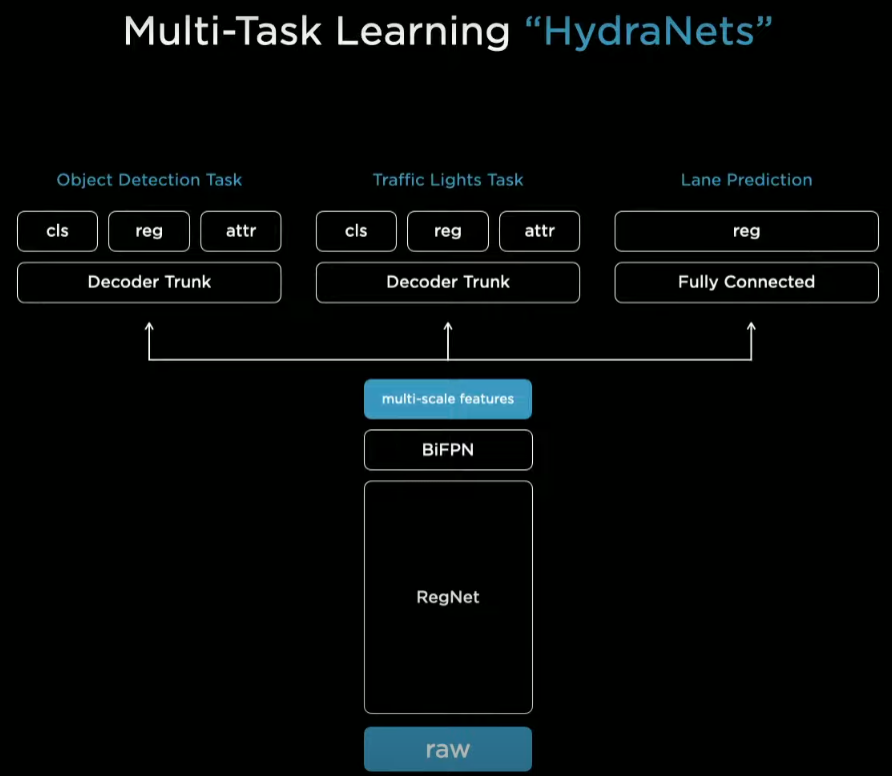
HydraNets 이란 오브젝트 판별 / 차량 판별 / 차선 예측(상황말하는듯) 으로 되어있어.


힘든 점은 어떤게 있었니?
1. 각각의 카메라를 하나로 합치는게 빡세더라고.

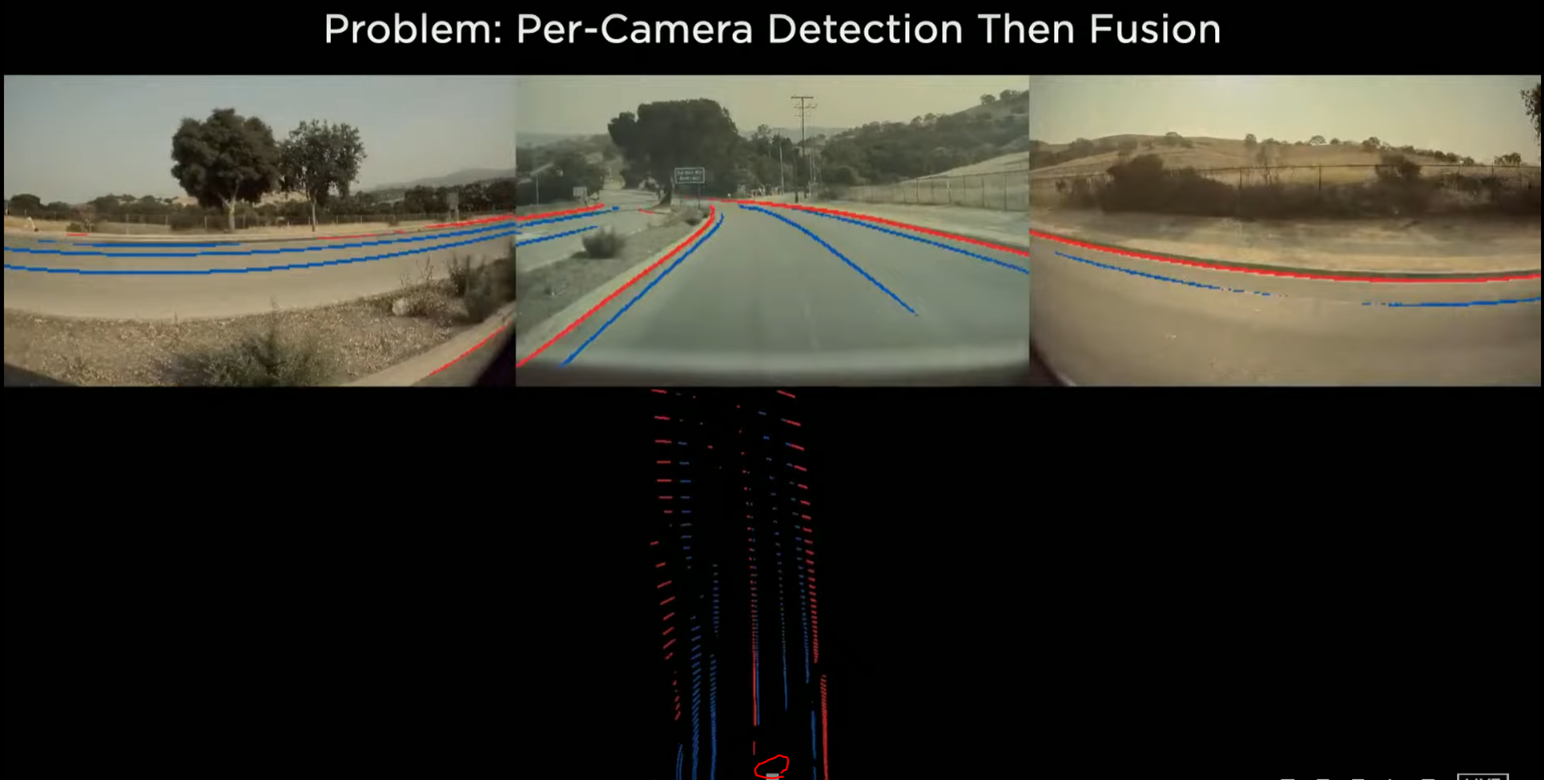
2. 같은 물체를 같다고 인지 시키는게 어려웠어.
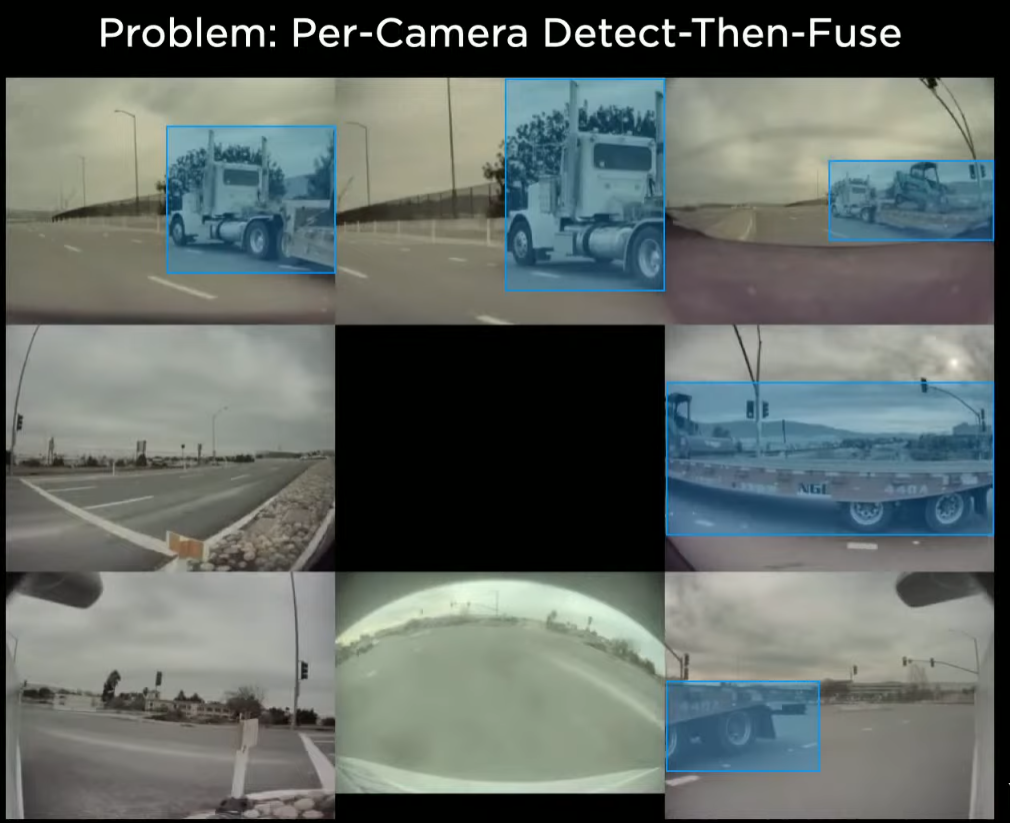
3. 이런 상황들을 하나로 합치는거 말야.
각각의 카메라와 하나로 합쳤을 때의 갭을 줄이는 것.
4. 이런거지!

그래서 어떻게 해결했어?
1. 앞선 문제점들을 먼저 다시 정리했어.
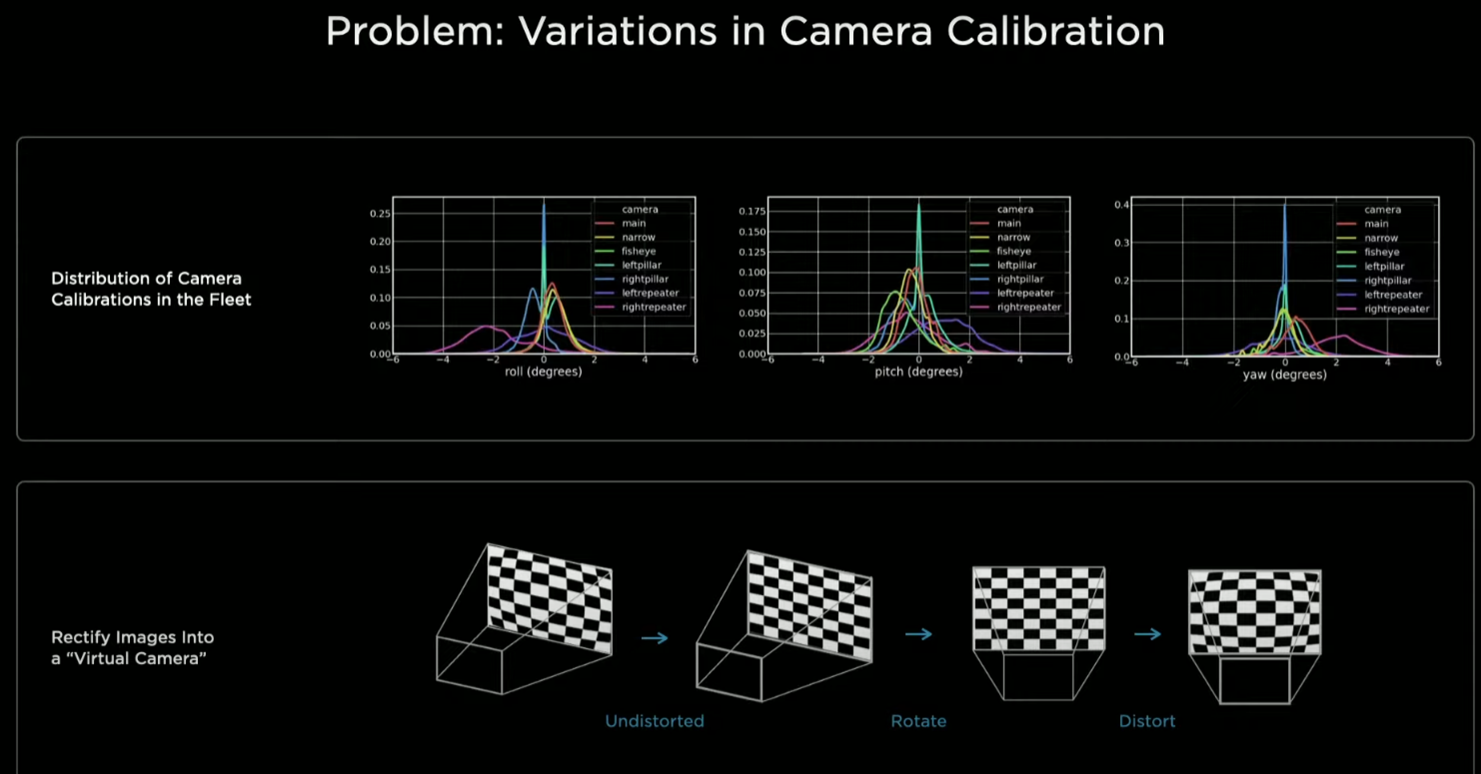
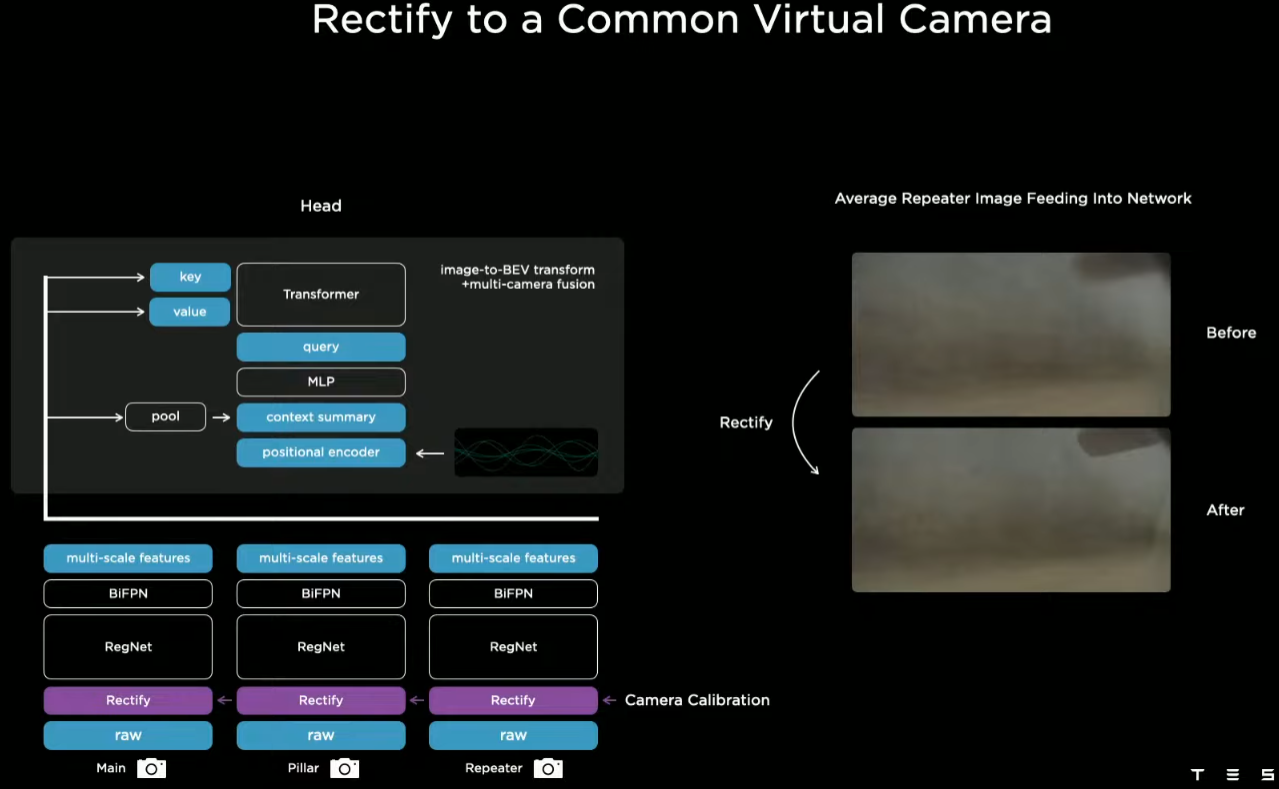
2. 먼저 리피터/필러/메인 멀티퓨전을 활용해 사진의 해상도를 정확히 했지.
3. 주변 경계를 나타내는 곳 말고 그 사이 벡터공간을 인식시켜 도로를 그려냈어. (인식범위 확대, 정밀도 상향)

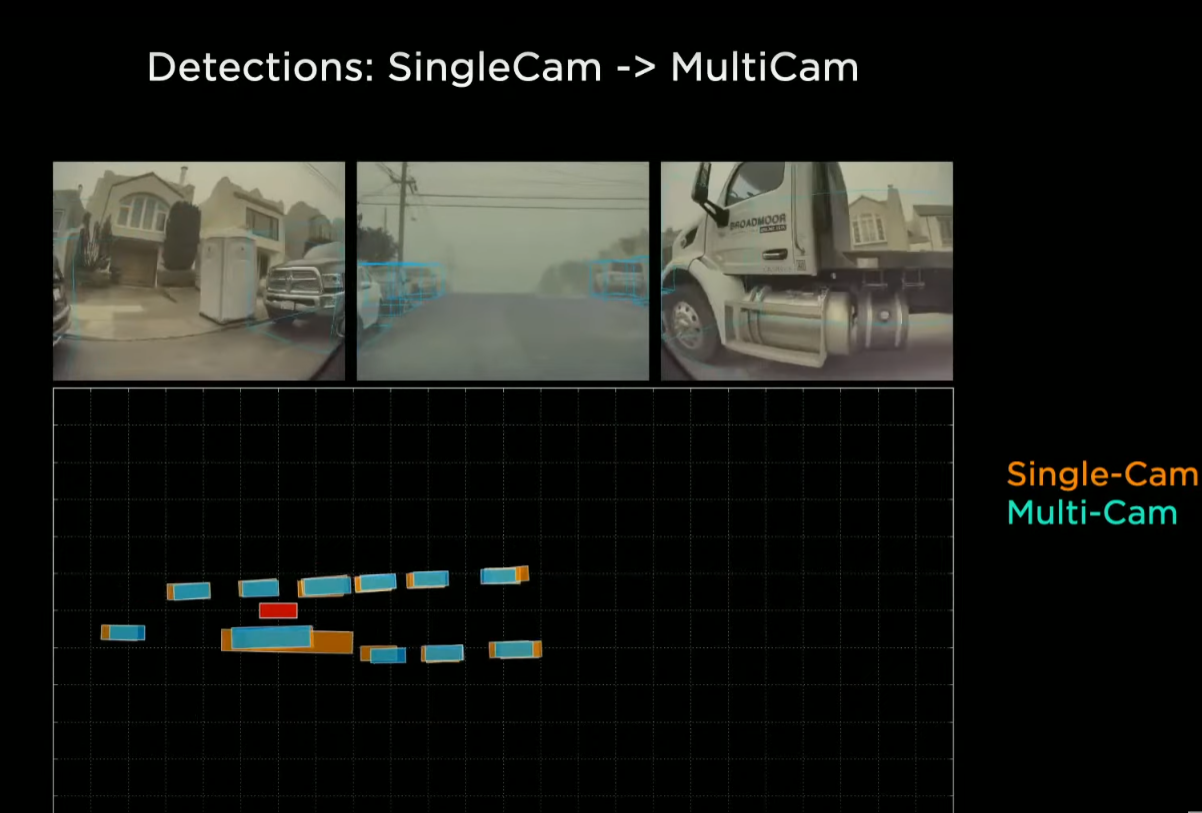
4. 싱글캠으로 인지하던 것을 멀티캠으로 인지하게 바꾸었어. (오차수정)
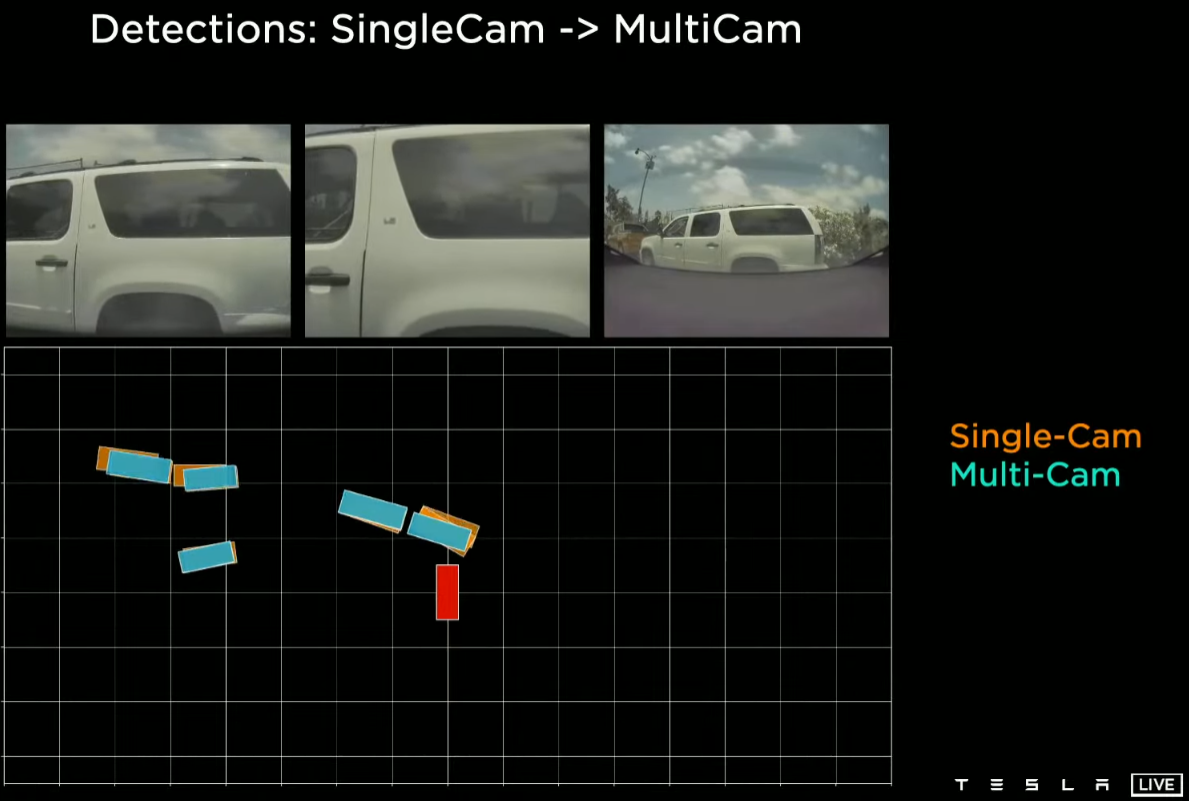
그럼 성과는 어떤게 있었어?
1. 우리만의 벡터공간을 정확히 그려내는데 성공했고, 벡터 레이블링 모델을 만들어 냈지.
(개쩌는겁니다 이거, 이게 제일 중요해요!!)

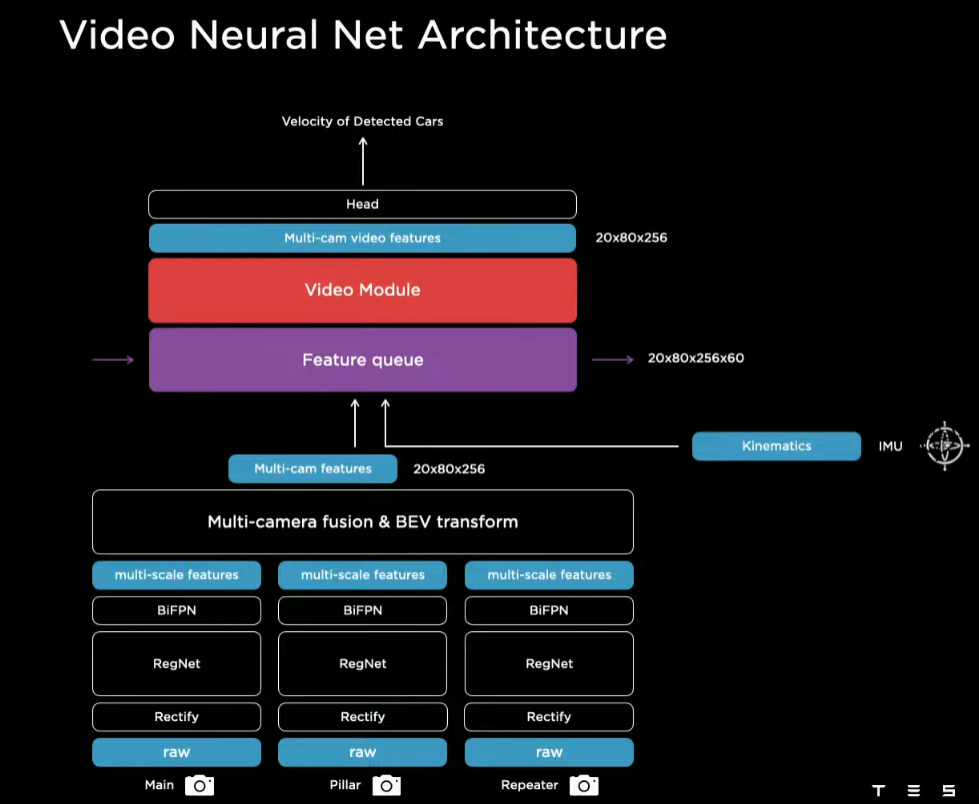
2. 이게 우리가 만든 벡터공간 재생 비디오 뉴럴넷 아키텍처야
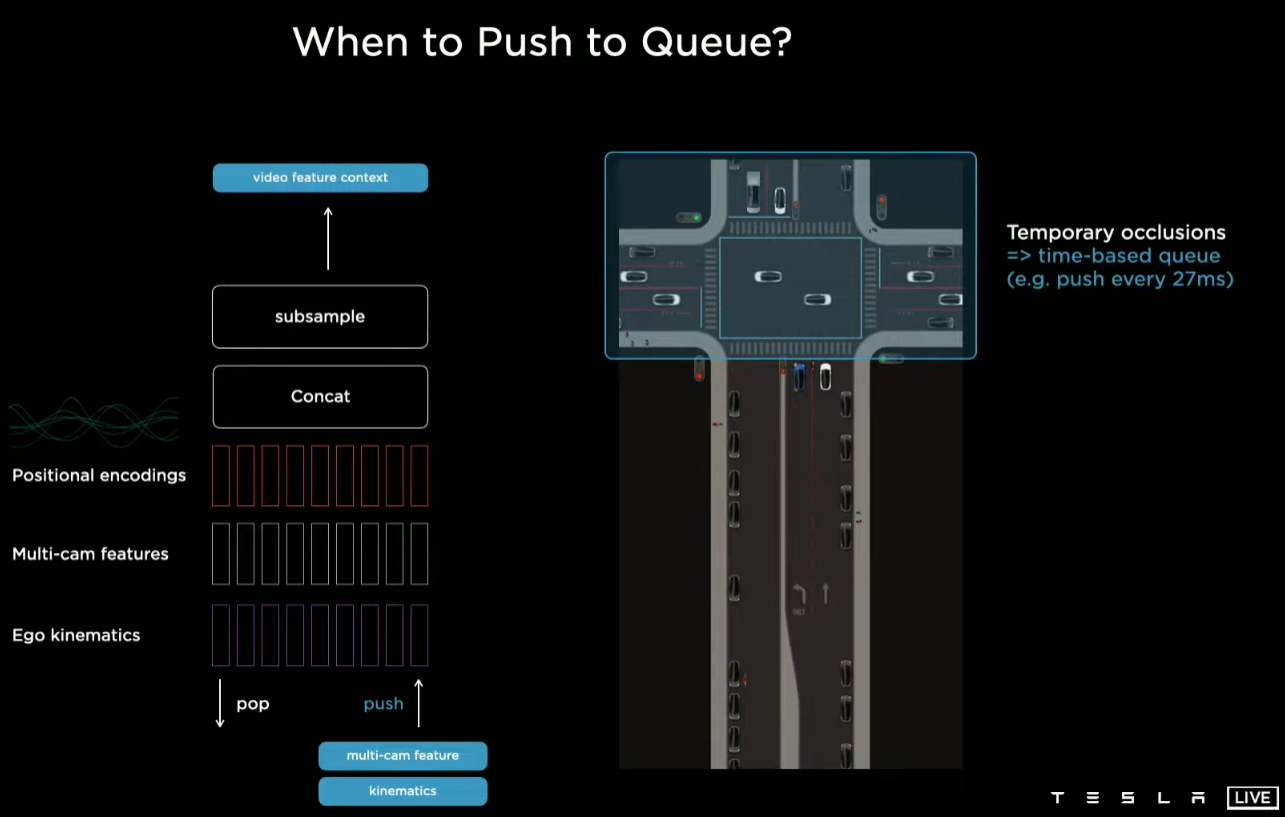
3. 처리과정 중 Que 는 이렇게 밀어내게 설계 했어. (Q 는 터널 생각하시면 됩니다. "FIFO")
4. 비디오 모듈은 이렇게 구성되었어. (3D 컨버젼 / 변환기 / RNN)
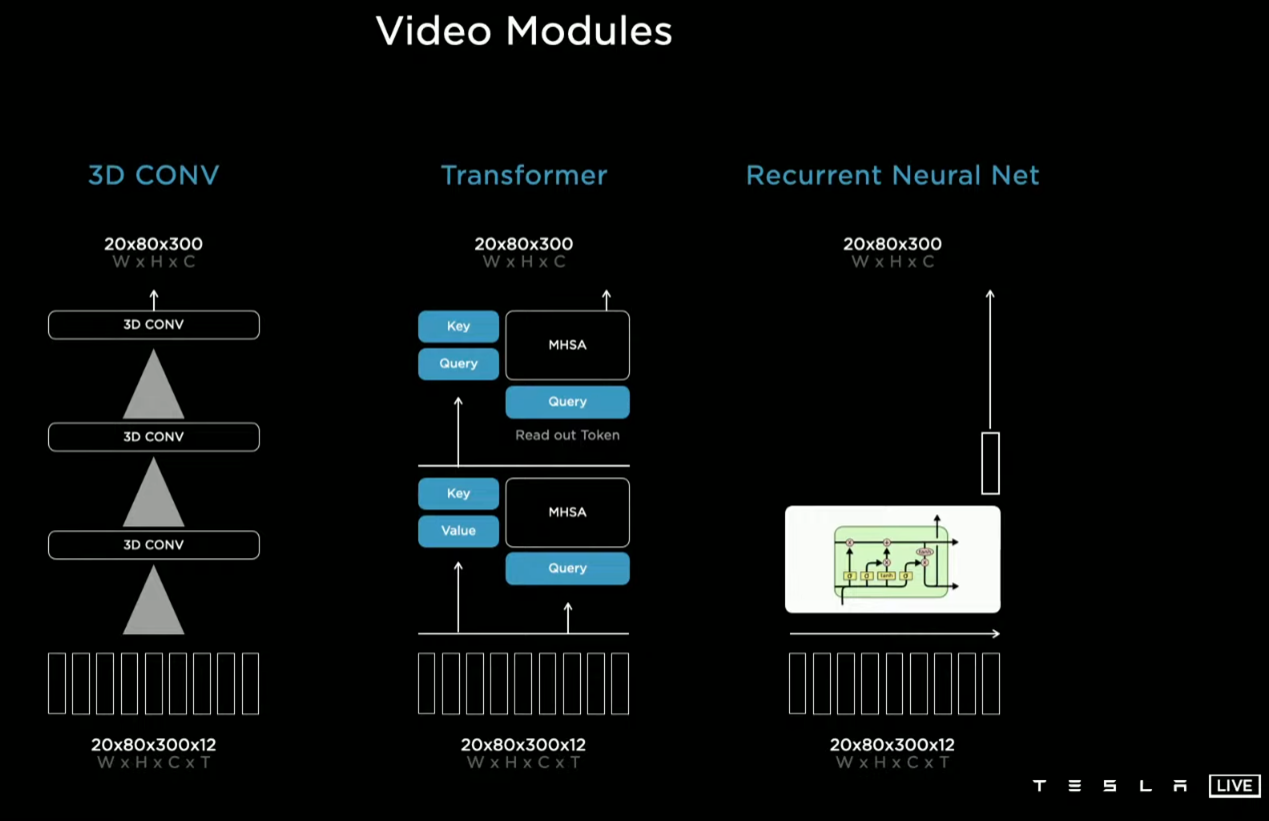
4. 그 중 RNN은 이렇게 이루어져 있고, 이런 공간데이터를 만들 수 있어. (핵심)


5. 오차를 이렇게나 많이 줄였고, 우리만의 아키텍처를 완성 시켰어.


여기까지가 현재 테슬라에서의 기술개발 내용 공유입니다.
위의 기술적인 내용은 공학자 아니면 너무 딥할 필요 없으니 키워드 위주로 보시면 되겠습니다.
1부 내용의 핵심은
벡터공간을 활용해서 카메라 퓨전을 더 정교하게 이루어 냈다.
그리고 그 과정과 모듈의 대한 설명이 이어진 것이고, 어떻게 진행중이다.
정도로 요약할 수 있겠습니다.
간단하게 써놓으니까 쉽죠?
2부로 고고!
'Invest | 투자 > 나 - Stock' 카테고리의 다른 글
| [A.I 데이 요약] 테슬라 A.I 데이 라이브 최대한 쉽게 요약한 글 4부 (TSLA A.I day smr) (0) | 2021.08.21 |
|---|---|
| [A.I 데이 요약] 테슬라 A.I 데이 라이브 최대한 쉽게 요약한 글 3부 (TSLA A.I day smr) (0) | 2021.08.21 |
| [A.I 데이 요약] 테슬라 A.I 데이 라이브 최대한 쉽게 요약한 글 2부 (TSLA A.I day smr) (0) | 2021.08.21 |



댓글